机器人操作系统(ROS)实验课程
第一节 ROS介绍以及安装
1. 机器人操作系统(ROS)简介
什么是ROS?
机器人操作系统(Robot Operating System, ROS),是一个灵活的软件框架,为机器人软件开发提供了丰富的工具和软件库,可以帮助人们提高开发机器人的效率。ROS尤其侧重机器人软件系统中的消息传递、分布式计算、代码复用和最新的算法实现。
ROS项目起源于2007年斯坦福大学STAIR机器人项目中的Switchyard子项目。ROS社区发展非常迅速,多数高端机器人公司都将其软件移植到ROS平台上(桃:但实际上更多的机器人公司会使用自研的中间件来代替ROS)。ROS在工业中的应用也取得了非常好的发展势头,ROS-Industrial可以把ROS框架的先进功能扩展到制造业。
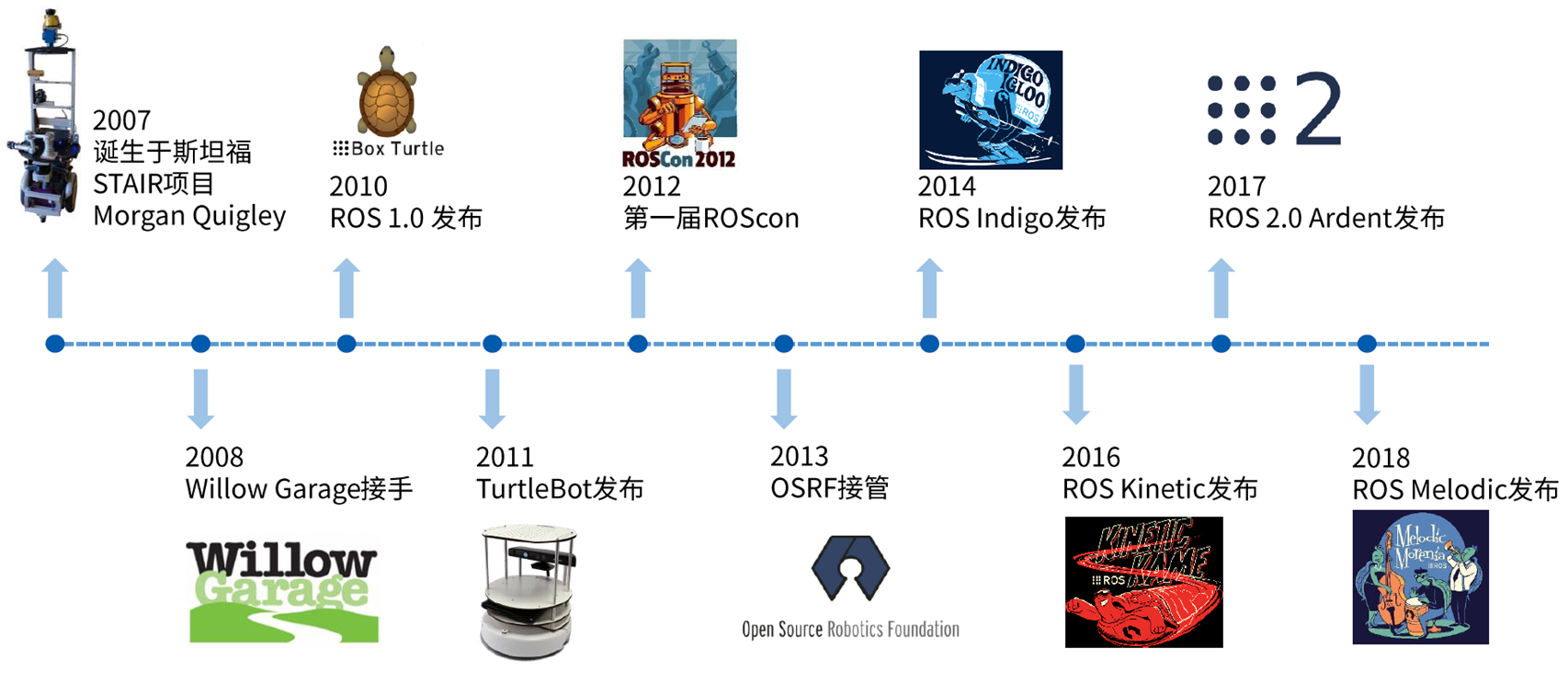
ROS的发展史
通常我们会用下面的图来描述ROS的发展史
为什么要用ROS?
坦白地来说,我们就是为了不重复的造轮子,为了建立一个能够在全球范围内协作开发机器人软件的环境,为了提高在机器人开发中软件的复用率,为了我们少熬夜,少拔头发,嘻嘻。
合作有什么不好捏,双win好过默默熬夜。

2. ROS的安装
ROS的安装历来是一个比较麻烦的问题,在我的印象里,如果你使用了conda管理Python环境,那么ROS的安装要在Conda之前,否则会出一些问题,但是由于时间太久,我并没有保存相关的问题记录,导致无法细说有哪些问题,不过ROS无法识别Python环境应该是存在的。
通过鱼哥(鱼香肉丝)提供的ROS一键安装脚本安装(个人推荐)
wget http://fishros.com/install -O fishros && . fishros
通过命令行的形式安装ROS
首先要确定自己的Ubuntu版本,这里给出一张表格用于对应ROS版本与Ubuntu版本
| ROS Version | Ubuntu Version |
|---|---|
| ROS 1 Kinetic | Ubuntu 16.04 |
| ROS 1 Melodic | Ubuntu 18.04 |
| ROS 1 Noetic (LTS) | Ubuntu 20.04 |
| ROS 2 Foxy (LTS) | Ubuntu 20.04 + Ubuntu 22.04 |
| ROS 2 Humble (LTS) | Ubuntu 22.04 |
| ROS 2 Iron | Ubuntu 22.04 |
| ROS 2 Rolling | UUbuntu 22.04 |
| ROS 2 Jazzy (LTS) | Ubuntu 24.04 |
按道理来讲我应该在这里开始就我的操作系统版本进行安装,但是我个人从命令行安装ROS的场景极少,由于本科阶段ROS的学习主要是通过机器人套件,对各个组件进行学习,因此我没有太多的机会or场景从命令行安装,因为我拿到机器人套件的是时候,系统镜像中就已经有ROS的配置了。
因此如果有同学需要从0开始配置ROS的环境,并且需要自己构建,建议参考CSDN